精品为您呈现,快乐和您分享!
收藏本站
 梵讯房屋管理系统v7.031官方版
梵讯房屋管理系统v7.031官方版
 CnCRM赛恩美外贸客户管理系统v5.0.0官方版
CnCRM赛恩美外贸客户管理系统v5.0.0官方版
 易维医学v1.0官方版
易维医学v1.0官方版
 配餐管理系统v1.0官方版
配餐管理系统v1.0官方版
 大智慧股票软件v8.57.0.23508免费版
大智慧股票软件v8.57.0.23508免费版
 同花顺软件v9.20.60官方版
同花顺软件v9.20.60官方版
 渲梦工厂v3.2.0.2官方版
渲梦工厂v3.2.0.2官方版
 开博仓库管理系统v3.40.230710官方版
开博仓库管理系统v3.40.230710官方版
 淘淘之星店铺小账本v5.0.0.536官方版
淘淘之星店铺小账本v5.0.0.536官方版
 云商电子销售管理系统v2.1官方版
云商电子销售管理系统v2.1官方版
应用简介
五明创新飞控开源地面站NGroundStation支持状态显示、参数调试、波形显示、数据导入导出、虚拟遥控、一键起飞、降落、SDK控制,采用QT开发,软件持续更新。
五明创新飞控开源地面站NGroundStation支持状态显示、参数调试、波形显示、数据导入导出、虚拟遥控、一键起飞、降落、SDK控制,采用QT开发,软件持续更新。
特征
1.1.主界面介绍及串口配置
无名创新地面站以免安装方式发布。用户从官网下载地面站后,可以直接解压,点击NGroundStation.exe运行。同一路径文件夹中后缀为.dll的依赖库文件不得随意删除,否则点击运行时会报xxx.dll文件丢失。
用户打开地面站后,进入如下主界面。导航栏有无名创新团队的介绍和软件使用帮助。主界面有各种功能模块。首先第一步点击配置串口:
点击后,软件会自动搜索当前电脑上可用的串口设备(USB转TTL设备、USB虚拟串口VCP、RS232/485等)。如果系统上没有可用的设备,软件会提示如下界面。请此时检查您的计算机。有相关的串口外围设备或者检查设备管理器,看是否有对应的外围驱动。
软件会自动搜索当前可用的串口设备,找到的序列号就是对应外设的设备号。当有多个串口设备时,需要选择需要连接的串口。可以通过波特率设置行的下拉菜单选择常用的波特率。同时,如果需要调试其他非常规设备,也可以手动输入任意波特率。输入完成后,请点击电脑的Enter键确认输入。不要按回车键,直接退出视为无效输入。设置完串口设备后,退出设置界面。在主界面点击打开串口,地面站解析数据后开始工作。
飞控状态、数据波形、参数调试、虚拟遥控、飞控标定等功能都是基于地面站对飞控数据的正常分析。因此,当上述功能接口无法正常使用时,请返回检查串口配置以及串口是否已打开/被占用。
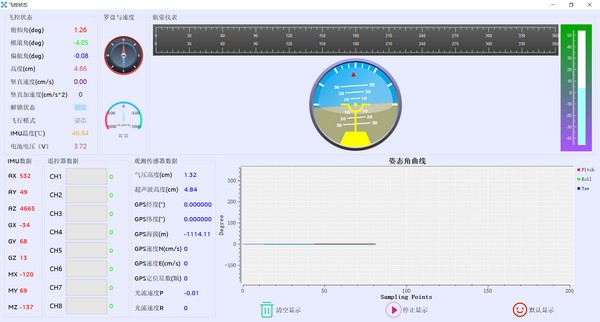
1.2.飞控状态显示
飞控状态显示界面分为基本飞控状态、指南针与速度、姿态仪、IMU数据、遥控数据、观测传感器数据、姿态角曲线等模块。用户可以通过地面站直观地实时观察无人机的常用状态。用户可以根据状态提示了解无人机的各项参数。

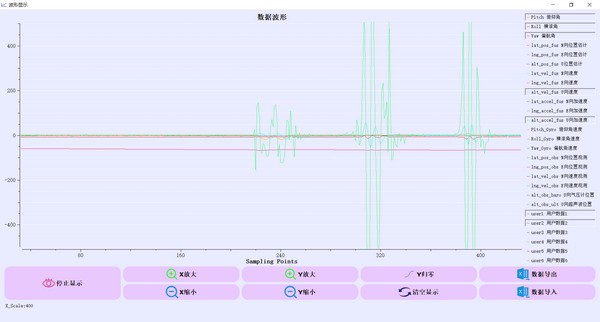
1.3.数据波形显示
数据波形显示界面可以动态观察无人机关键状态的数据波形曲线,如分析各种传感器数据、姿态数据、惯性导航数据、控制指令等数据,自己对飞行控制进行研究和比较算法性能、滤波器参数调整和突变。在故障异常分析时非常实用。无名创新地面站预留了6组用户数据通道,供客户自行发送数据。数据波形支持导入导出,文件名精确到计算机系统时间到S。导出的csv格式数据可以方便地使用Matlab、Origin等数值处理软件进行后续数据处理和分析。
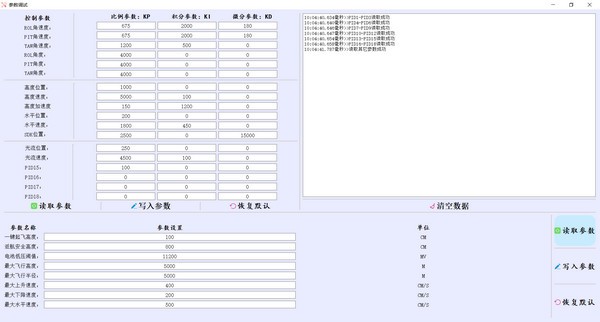
1.4.参数调试
在学习过程中,自研飞控开发人员需要通过组合不同动力单元来调整飞控PID参数,以保证无人机具有稳定的飞行性能。关键参数是姿态内环-角速度环参数。主要工作是调节角速度环、主PD、辅助积分参数I的PID参数。进入参数调试界面后,各个参数框为0,点击先读取参数。地面站将向飞控发送参数采集命令。地面站获取飞控发送的参数后,会刷新UI界面,显示当前内部飞控。参数。当需要调整参数时,在相应的参数框中手动输入设置参数。点击写入参数后,飞控会将参数保存到FLASH/EEPROM中。下次开机时飞控会自动从FLASH/EEPROM中读取。参数值。飞控其他参数的设置过程也是如此。先阅读,更改,然后单击写入。当用户想要恢复默认初始参数时,只需点击“恢复默认参数”即可。当用户写入并恢复设置的参数时,飞控会向地面站返回操作是否成功的响应,以显示写入状态。
1.5.虚拟遥控器
虚拟遥控界面模拟8路双路中文遥控器的数据。默认情况下,1-8通道的数据以左油门的形式发送。该功能可以解锁锁定的电机并测试无人机的电调行程,无需遥控操作。如果要在实际飞行中使用该功能,需要保证当前实际情况下所有数据传输模块能够可靠地通信。发送数据的同时,地面站接收正常飞控分析数据的返回数据,并计算通信的成功率。地面站每20ms发送一次遥控数据,飞控端在20ms内返回响应。通讯正常。如果飞控端的响应频率低于50HZ,实际上可能会导致通信没有异常,但地面站获得的成功率低于100%的情况。同时设计了飞行指令控制功能,即通过指令控制无人机空间的位移方向和距离。
1.6.飞控标定
开始飞行控制的第一步是传感器校准。打开飞控标定界面。有四种与传感器相关的校准操作。其中陀螺仪标定和机架水平标定不需要飞行器手动操作。保持无人机静止且水平。单击校准按钮自动进行。飞行器每次开机都会自动进行陀螺仪校准。即飞控IMU温度升到50后,如果此时飞机保持静止,陀螺仪会自动校准偏移,地面站也会加入。为了手动校准陀螺仪零偏,点击开始校准陀螺仪后,飞控会再次自动校准陀螺仪零偏。
飞控加速度标定采用与APM/PX4相同的6面标定方法。首先点击加速度校准进入,然后点击对应的侧边按钮。双方都会提示如何放置飞行器。 6面数据全部采集完毕后,飞控将计算出标定参数并发送给地面站。
磁力计标定采用椭球拟合方法,实际需要采集3个平面的36个角点数据。飞控自带显示屏会提示如何放置和旋转每一面,显示屏显示各个角点的数据采集状态。三个表面的所有角点采集完毕后,将计算出标定参数并发送给地面站。
机架水平校准的主要目的是测量安装在机架上的飞控与水平面之间的角度误差。所以需要和关卡结合起来操作。实际中,飞控安装在机架上后,首先校准加速度计,然后将水平仪放置在机架所在平面上,调整机架三脚架,使水准泡居中,然后进行机架调平校准操作。
其他获取校准参数、退出当前校准等按钮不再详细描述。以上所有校准,除磁力计外,都要求温控系统稳定工作,因此最好等到温度达到50并稳定后再启动陀螺仪。加速度和机架水平校准操作。无名飞控维持遥控器直接校准的方式进行飞控校准,用户可以根据实际场景灵活确定。遥控器传感器校准视频教程如下。
1.加速度标定教程:https://www.bilibili.com/video/BV1it411k7CJ?from=searchseid=255111440291059640*
2.磁力计校准:https://www.bilibili.com/video/BV1it411k7CC?from=searchseid=15429067159432134560*
3. 机架水平校准:https://www.bilibili.com/video/BV1L4411E7j2?from=searchseid=14438186151189674967*
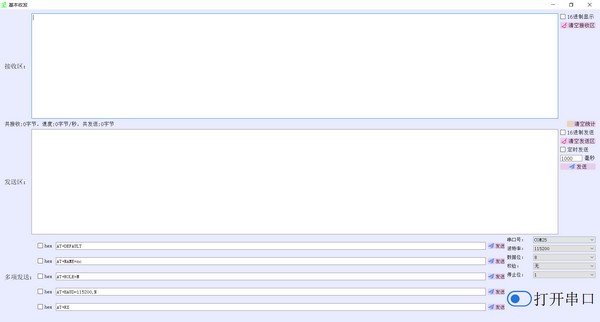
1.7.基本发送和接收
地面站保留了普通串口调试助手的功能,与上述功能有所不同。可以作为实用的普通串口调试助手。数据以文本/十六进制格式发送和接收、定时自动发送、多命令发送等。
热门攻略
热门资讯