精品为您呈现,快乐和您分享!
收藏本站
 VG浏览器v9.7.3.10官方版
VG浏览器v9.7.3.10官方版
 网易邮箱大师v5.0.6.1015官方版
网易邮箱大师v5.0.6.1015官方版
 腾讯云企业网盘v2.7.0官方版
腾讯云企业网盘v2.7.0官方版
 UU远程v0.1.5.541官方版
UU远程v0.1.5.541官方版
 网易uu网游加速器v4.69.0官方版
网易uu网游加速器v4.69.0官方版
 中国移动云盘v7.6.3官方版
中国移动云盘v7.6.3官方版
 5866游戏商城上号器v9.7.1.10310官方版
5866游戏商城上号器v9.7.1.10310官方版
 阿里云盘v4.9.14官方PC版
阿里云盘v4.9.14官方PC版
 爱思远控v1.0.32官方版
爱思远控v1.0.32官方版
 360浏览器v15.1.1265.64官方最新版
360浏览器v15.1.1265.64官方最新版
应用简介
电源管理简介更快的响应时间、更高的精度和目标的自动获取使操作员能够同时处理多个批次。
电源管理引 言
更快的响应速度、更高的精度、自动目标捕获以及操作员同时处理多批次目标的能力是现代雷达追求的技术指标。雷达视频信号的数字采集和检测是实现这一目标的先决条件。
众所周知,雷达对目标位置的测量主要是根据目标回波相对于发射无线电波的延迟时间和雷达天线的方向来确定的。无线电波的传播速度极快,传播一海里所需时间仅约12.35s。雷达发射无线电波的时间间隔一般为毫秒量级。在此期间,理论上将会有多达数百或数千个目标的回波。为了在如此短的时间内以数字方式收集和处理如此多的目标回波信号,快速采集设备和高速计算机处理器至关重要。 DSP(Digital Signal Processor)芯片,即数字信号处理器,是一种特别适合这种实时信号处理的微处理器。本文以某雷达的技术参数为参考,采用TMS320VC5402作为信号处理器,AD9223作为A/D转换器,采用双口存储芯片IDT7203作为数据暂存器,介绍一种实现数字化雷达的方法。雷达回波信号的采集和处理。方法。
1 主要器件特性
TMS320VC54x是TI公司开发的一款低功耗、高性能数字信号处理芯片。主要应用于无线通信系统和雷达信号处理。
本文使用的TMS320VC5402芯片是该系列的典型产品。该芯片的主要特点是:速度快,指令周期10 ns,运算能力100 MIPS;强大的寻址能力,最大可寻址外部存储器1M次; 16位,内置16Ktimes; 16位内存,4K次; 16位ROM; 40位算术逻辑单元(ALU),包括两个独立的40位累加器和一个40位桶形移位寄存器; 17位次; 17位硬件乘法器和40位专用加法器、乘法器/加法器单元可以在一个流水线状态周期内完成一次乘法累加(MA)运算。
AD9223是一款高性能、低噪声、单电源、12位模数转换器,采用高速CMOS处理和新颖的4级流水线架构。适用于导航、通信、雷达、医疗等领域的数据采集系统。其主要特点是:高速、高分辨率,采样时钟频率高达3Msps,分辨率12位;单时钟输入,使用单个时钟输入来控制所有内部转换周期;灵活的模拟信号输入,真正的差分输入结构允许模拟信号以单端或差分格式输入;灵活的参考电压适应不同应用的精度和温漂要求。参考电压可以是内部或外部(1V或2.5V);并采用4级流水线。该结构和宽带采样保持放大器(SHA)使器件能够在每个时钟周期捕获输入采样信号,数据输出延迟为3个时钟周期。
IDT7203 是一款双端口先进先出(FIFO) 9 位内存缓冲器,内存容量为2 KB。输入和输出有自己的地址指针。对于每次读或写操作,相应的输出和输入地址指针都会自动加1。复位信号会清除两个地址指针。它提供外部数据区空、半满和满信号来指示设备的状态。最快读写速度为12 ns。
2 二级门限判决的工作原理
雷达视频信号总是包含目标信号和噪声信号,即x(t)=s(t)+n(t)。雷达信号处理的根本目的是从接收到的视频信号x(t)中提取有用的目标信号s(t),滤除无用的杂波或干扰信号n(t)。在处理雷达信号时,事先无法得知特定条件下目标出现的概率,很难确定漏报造成的损失。因此,经常使用Neyman-Pearson准则,即在允许一定概率的误报的条件下。以尽量减少错过警报的可能性。两级阈值决策方法是一种有效实用的雷达信号处理方法。
2.1 二级门限判决原理
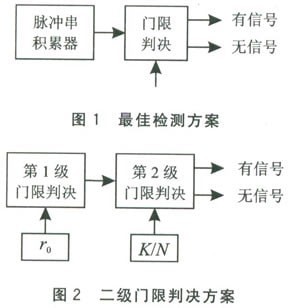
根据最优检测理论,对于非相干高频脉冲串,采用检测后累加(视频累加)的方式是提高雷达检测性能的最佳方案。原理如图1所示。该方案如果采用模拟电路处理,会比较复杂,实现起来比较困难;如果采用数字处理,直观的方式就是将雷达接收机的视频信号根据距离(时间)和幅度量化为数字信号,然后存储N个重复周期。
对于每个重复周期,根据距离单位设置每个单元的信号幅度值的阈值(r0),称为第一阈值。将每个重复周期内量化的所有距离单元的视频信号值x(ti)的幅度值与其对应的阈值roi进行比较。如果视频信号值超过其阈值,则认为是“可能目标”信号;否则视为无信号。
这个过程称为第一级阈值决策。每个重复周期内对应每个距离单元建立的第一阈值(roi)不同,每个重复周期内建立的第一阈值(roi)也不同。每个重复周期建立的第一阈值集合称为杂波均值估计表或杂波图。对于“可能目标”信号,并不能确定它是目标信号。因为有时会有突发的杂波干扰信号或者随机噪声信号,所以每次扫描的样本都是无关的。他们可能会偶然超过第一阈值一次或两次,但连续多次超过第一阈值的可能性很小;对于目标来说,每次相邻扫描都应该有回波信号,并且在N个样本中连续超过第一阈值的概率比较高。因此,需要以距离为单位对超过各自第一阈值的量化脉冲进行计数。如果在N个重复周期内多于K个量化脉冲超过其各自的第一阈值,则确定存在信号。这个过程称为二级阈值决策(K/N决策),K/N称为第二阈值。工作顺序如图2所示
2.2 杂波均值估值表的建立
杂波平均值估计表(杂波图)是基于每个重复周期的雷达视频信号的量化值而建立的每个距离单位的杂波信号的平均值的表。确定的方法是相邻单位平均计价法。具体来说,设某个距离单元ti上的视频信号为x(ti),以单元ti为中心,取前后总共n个参考距离单元,对这n个参考单元的视频信号值进行平均。
作为该范围单元内杂波的平均估计。第一阈值roi值,也称为距离单位,其大小由雷达探测区域的杂波环境决定。 n值越小,由于参考单元太少,杂波平均估计波动越大,会导致误报概率增加; n的值越大,杂波平均估计的波动越小,即第一阈值越稳定,可以获得越恒定的虚警效果,但会增加资源开销,增加实施难度。对于气象杂波和波浪杂波,它们通常是连通区域,更适合采用邻近单元平均估计方法建立杂波平均表。这里n为16。由于使用52.5 m作为距离单位,因此相当于检测点前后420 m。
对距离范围进行杂波的平均估计。
2.3 第二级门限值K/N的计算
为了确保符合奈曼-皮尔逊准则,N值的选择应取决于天线波束扫过目标期间来自目标的回波脉冲数量,该数量由雷达的工作参数决定。对于某型船用雷达,其部分工作参数为:重复频率1 200 Hz,触发脉冲宽度0.7mu; s,天线转速20 r/min,天线波束宽度0.7deg;工作范围40海里。 N的取值为N=O.7;1 200/(20;6)=7。根据经验,K的值为1.5radic;N。这里K=4,即K/N=4/7。
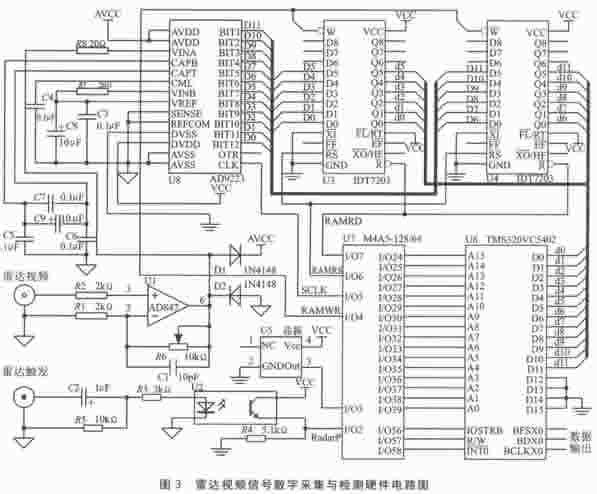
3 硬件电路设计
硬件电路工作原理如图3所示。根据雷达的主要技术参数可知,雷达的距离分辨率为150倍; 0.7=105m。在不降低原雷达性能的情况下,这里选择采样频率为2.857 142 857 MHz(相当于52.5 m作为样本)。距离单位)。存储器以相同的速率收集数据(大约每52.5 m 收集一个雷达视频信号值)。在这种情况下,对于40海里的最大测距范围,对应于雷达的每次发射,电路应采集1,412个距离单位的视频信号的量化值(这里取1,500个距离单位)。因此,双口RAM容量选择为2KB即可。由于访问速度需要快,因此选择了IDT7203。关于信号的量化位数,即A/D转换位数的选择,考虑到量化噪声的影响,选择的位数越多,影响越小。为了兼顾DSP的处理能力和A/D转换装置的转换速度,采用12位。
A/D转换器AD9223的设置:使用片内2.5V作为参考电压; VINB连接参考电压值,使得VINA的输入值可以达到最大5V,最小0V;运算放大器U3提供的视频信号应满足这一要求。
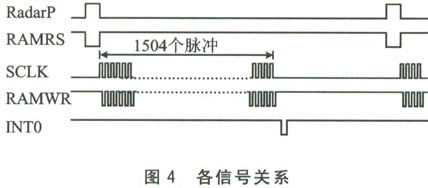
雷达的触发脉冲用作系统操作的同步信号。从触发脉冲的下降沿开始,为A/D转换器提供2.857 142 857 MHz采样同步脉冲信号。 12位精确的视频信号值以相同的速率驱动到两个双端口RAM(IDT7203)中。当输入数据达到1504个单位时(由于A/D转换器的数据输出对视频输入信号有3个时钟周期的延迟,所以这里采集了1504个距离单位的数据),DSP产生中断信号。这些信号是由基于雷达的大规模可编程逻辑器件(Lattice M4A5-128/64)产生的地址信号和读写信号组合产生的触发脉冲、晶振和I/O操作DSP 的。它们的时序关系如图4所示。
DSP响应中断信号后,执行中断服务程序进行数据接收。程序以极快的速度将双口RAM中的数据提取到自己的内存中。此时,DSP再运行滤波和目标提取程序,最后通过串行接口传输处理完毕的数据。
双口RAM的读信号RAMRD是由DSP执行读取OFF00H地址的指令时产生的地址信号(OFF00H)、WR信号和10STRB信号共同作用产生的。
4 软件设计
该软件的主要任务是对已经数字化的视频信号进行处理。为了实现快速处理,程序采用汇编语言编写,保证数据在重复循环内处理。程序运行的区域布置在TMS320VC5402片内RAM中0000H~03FFH的1KB存储器中。数据输入区为0400H09FFH,占用1.5 KB内存。杂波均值估计表(杂波图)位于OA00H~OFFH,占用1.5 KB内存。输出数据区(处理结果)位于1000H~15FFH,占用1.5 KB内存。从1600H到3FFFH的10.5KB存储区被均匀地划分为7个数据区,作为7个重复周期的数据积累区。对于每个存储雷达视频信号量化数据的存储区域,每个地址单元的地址代表一个距离单元,其中存储的数据代表视频信号在该距离单元处的幅度量化值。程序响应中断后,工作过程为:数据采集rarr;建立杂波均值估计表(杂波图)rarr;第一个阈值决策rarr;第二阈值决策rarr;数据输出。方位信号的采集以及处理后数据的输出这里不再讨论。
4.1数据的采集
由于TMS320VC5402运行速度极快,单指令周期为10 ns,双口RAM最快访问速度为12 ns。为了保证数据的可靠读取,I/0操作设置为延迟2个执行周期。 DSP响应外部中断0(INTO)后进入中断服务,将双口RAM中的数据读入DSP内置存储器从0408H开始的1500个单元中。程序初始化时,将从0400H开始的8个单元都设置为0。这完全是为了计算杂波平均估计表(杂波图)时编程方便。程序如下:
获取数据:STM#0408H6;初始地址
RPT#(1500mdash;1);重复次数
PORTR OFF00H,*+;读取数据
RETEnbs
p;中断返回
4.2 建立杂波均值估计表
根据3.2中杂波均值估计表的建立方法,对于每个距离单元,从第一个距离单元取8个,从最后一个单元取7个,共16个参考单元,计算平均值,得到单位的杂波平均估计。计算总共1500个范围单元杂波均值估计并将其放置在OA00H ~ OFFFH的存储区域中。具体实现时,首先需要计算第一单元的杂波平均值估计,后续的计算需要逐一进行。程序代码如下:
STM#O4ooH,AR5;读取数据首地址
STM#OA00H,AR7;平均估值的首地址
RPTZ A,(16mdash;1);循环16次
ADD*AR5+,A;总和
STL A,a 4,*AR7+;除以16并放入估价表中
STM #0400H,计算剩余的1 499
STM#(1500-2)、BRC
RPTB ZBEND-1
子*+,A
添加*AR5+,一个
STL A,a 4,*AR7+
Z弯曲:RET
4.3 第一级门限判决
将读取到的以距离单位为单位的雷达视频信号值与杂波均值估计表中对应距离单位的值进行一一比较:如果某个单元的雷达视频信号值大于其对应的杂波均值估计,该单元被认为是“可能目标”的回波信号,将其放置在数据积累区(从1600H开始)的相应单元中,同时也放置在输出数据块(从1600H开始)中1000小时);否则,这两个单元均被清除。程序中使用AR3作为数据积累区的地址指针。其初始值为1600H,由初始化程序设置。程序代码如下:
STM#0408H,AR7;输入数据区首地址
STM #oA00H,均值评估表首地址
STM#1000H,AR5;输出数据区首地址
STM#(1500-1), BRC:距离单位总数
RPTB PJlE-1;重复
LD*+,A;进行杂波均值估计
STM*AR7,T;获取输入数据
ST#0,*AR3;首先清除堆积区域
ST#O,*AR5;首先清除输出区域
SUB*AR7+,A;比较
STRCD*AR3+、ALT;数据量大,单独放置
STRCD*AR5+、ALT;积累区和输出区
PJlE:LD AR3,B;调整累积区域指针
添加#100H,B
和#OFF00H,B
SUB #4000H,B
BC PJLEND、BLT
子#2A00H,B
PJIEND:添加#4000H
,B
STML B、AR3;累加区指针调整结束
视网膜色素变性
4.4 第二级门限判决
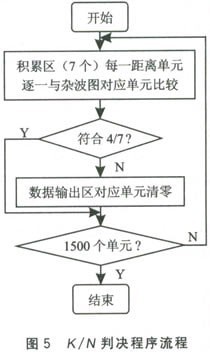
第二阈值决策是在第一阈值决策的基础上,滤除掉那些偶然超过第一阈值的孤立的、不相关的杂波噪声信号,而是在多次扫描中,即对于那些“可能”目标的信号进一步处理为进一步降低了所检测目标的误报概率。根据2.3节的讨论,第二阈值(K/N)的值为4/7。由于在第一阈值判定处理过程中已经建立了7次扫描的累积数据和初步输出数据,因此它们分别位于数据累积区和数据输出区。因此,在程序的具体实现中,根据最新累加的数据,对测量范围内的每个距离单元一一进行K/N判断。如果满足K/N判断标准,则输出数据区的值保持不变。如果满足条件,则将距离单位所在数据输出区的值清零。由于程序代码较长,所以用图5所示的流程来表示。
结 语
本文介绍了一种基于DSP的雷达视频信号数字采集与处理系统的设计。作为一种雷达视频信号处理方法,适用于多种雷达的信号处理。对于不同类型的雷达,由于其用途不同,其技术参数也不同。只要选择合适的工作参数,该设计仍然适用于其他类型雷达的视频信号。
热门攻略
热门资讯